EmbodiChain#
—
EmbodiChain is an end-to-end, GPU-accelerated framework for Embodied AI. It streamlines research and development by unifying high-performance simulation, real-to-sim data pipelines, modular model architectures, and efficient training workflows. This integration enables rapid experimentation, seamless deployment of intelligent agents, and effective Sim2Real transfer for real-world robotic systems.
Note
EmbodiChain is in Alpha and under active development:
More features will be continually added in the coming months. You can find more details in the roadmap.
Since this is an early release, we welcome feedback (bug reports, feature requests, etc.) via GitHub Issues.
Key Features#
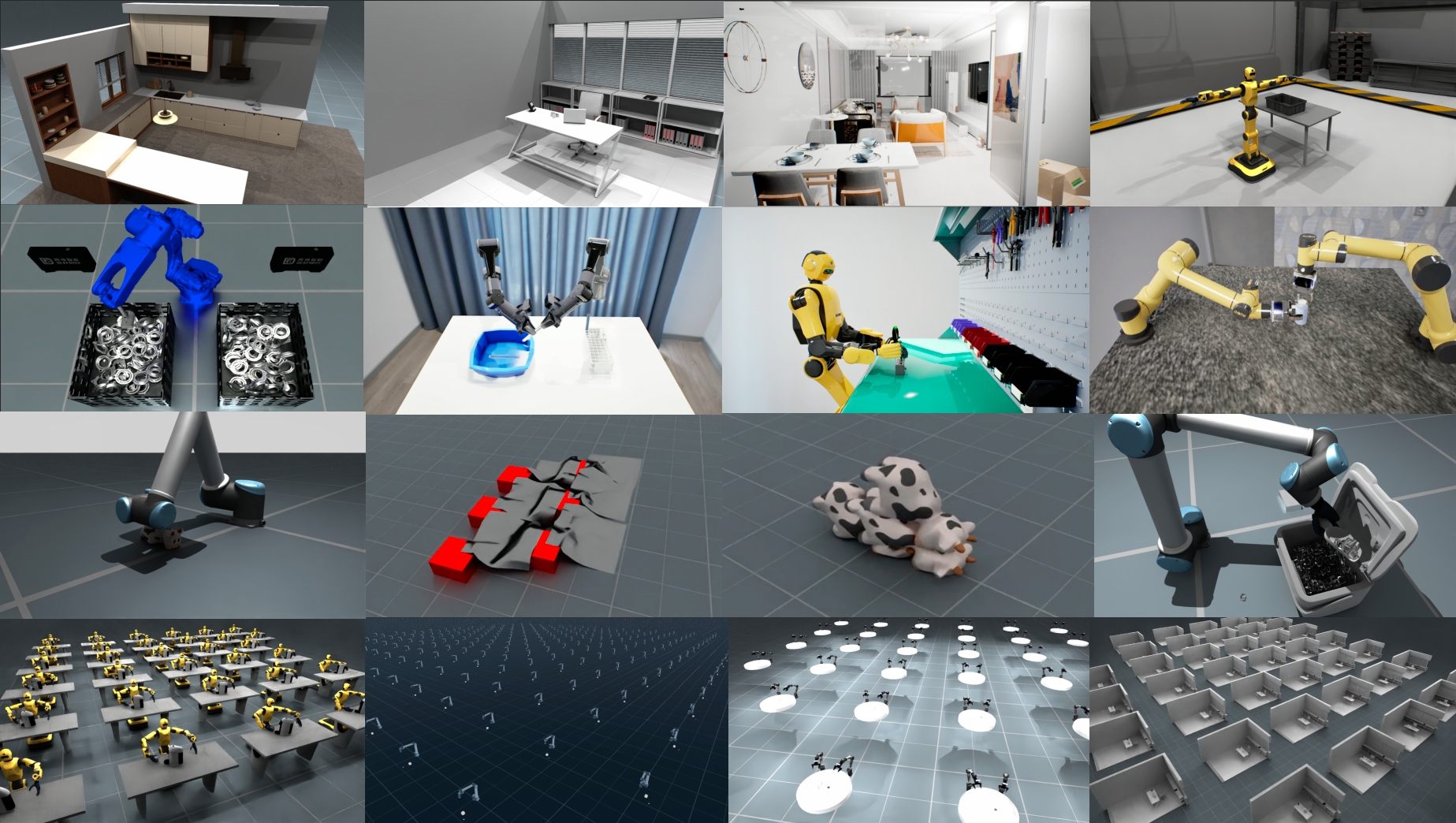
🚀 High-Fidelity GPU Simulation: Realistic physics for rigid & deformable objects, advanced ray-traced sensors, all GPU-accelerated for high-throughput batch simulation.
🤖 Unified Robot Learning Environment: Standardized interfaces for Imitation Learning, Reinforcement Learning, and more.
📊 Scalable Data Pipeline: Automated data collection, efficient processing, and large-scale generation for model training.
⚡ Efficient Training & Evaluation: Online data streaming, parallel environment rollouts, and modern training paradigms.
🧩 Modular & Extensible: Easily integrate new robots, environments, and learning algorithms.
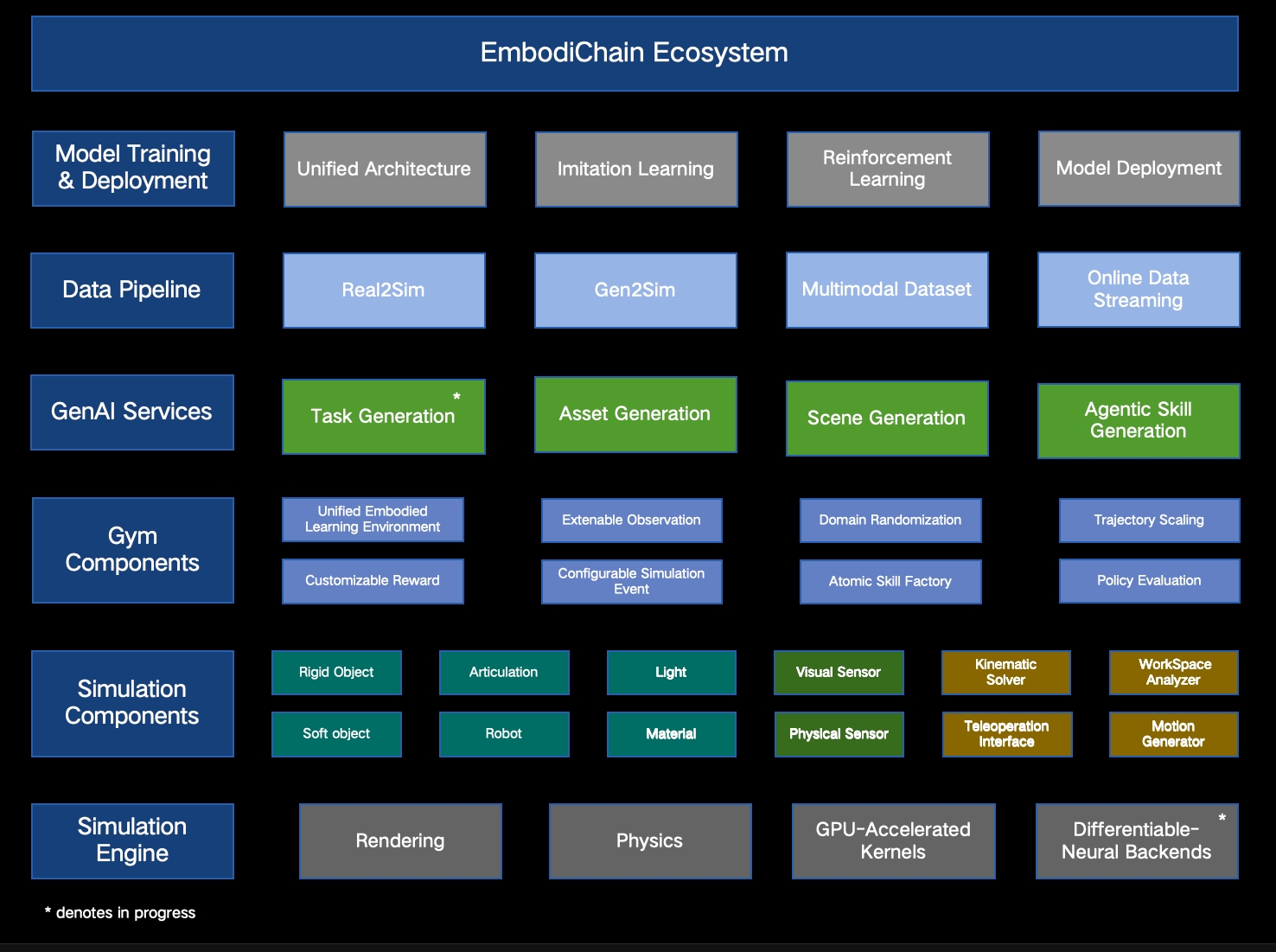
The figure below illustrates the overall architecture of EmbodiChain:
Getting Started#
To get started with EmbodiChain, follow these steps:
Citation#
If you find EmbodiChain helpful for your research, please consider citing our work:
@misc{EmbodiChain,
author = {EmbodiChain Developers},
title = {EmbodiChain: An end-to-end, GPU-accelerated, and modular platform for building generalized Embodied Intelligence.},
month = {November},
year = {2025},
url = {https://github.com/DexForce/EmbodiChain}
}
@misc{GS-World,
author = {Guiliang Liu and Yueci Deng and Zhen Liu and Kui Jia},
title = {GS-World: An Efficient, Engine-driven Learning Paradigm for Pursuing Embodied Intelligence using World
Models of Generative Simulation},
month = {October},
year = {2025},
journal = {TechRxiv}
}
@inproceedings{Sim2RealVLA,
title = {Sim2Real {VLA}: Zero-Shot Generalization of Synthesized Skills to Realistic Manipulation},
author = {Runyi Zhao, Sheng Xu, Ruixing Jin, Yueci Deng, Yunxin Tai, Kui Jia, Guiliang Liu},
booktitle = {The Fourteenth International Conference on Learning Representations, ICLR},
year = {2026},
url = {https://openreview.net/forum?id=H4SyKHjd4c}
}