Workspace Analyzer#
The Workspace Analyzer is a comprehensive tool in EmbodiChain for analyzing robot workspace characteristics, reachability, and performance metrics. It provides multiple analysis modes with advanced sampling strategies, caching mechanisms, and visualization capabilities.
Table of Contents#
Quick Start#
import torch
import numpy as np
from embodichain.lab.sim import SimulationManager, SimulationManagerCfg
from embodichain.lab.sim.robots import DexforceW1Cfg
from embodichain.lab.sim.utility.workspace_analyzer import (
WorkspaceAnalyzer,
WorkspaceAnalyzerConfig,
AnalysisMode
)
# Setup simulation
sim = SimulationManager(SimulationManagerCfg(headless=False, sim_device="cpu"))
# Add robot
robot = sim.add_robot(DexforceW1Cfg.from_dict({
"uid": "dexforce_w1",
"version": "v021",
"arm_kind": "industrial"
}))
# Quick analysis with defaults
analyzer = WorkspaceAnalyzer(robot=robot, sim_manager=sim)
results = analyzer.analyze(num_samples=1000, visualize=True)
print(f"Analysis complete: {results['num_reachable']} reachable points")
Analysis Modes#
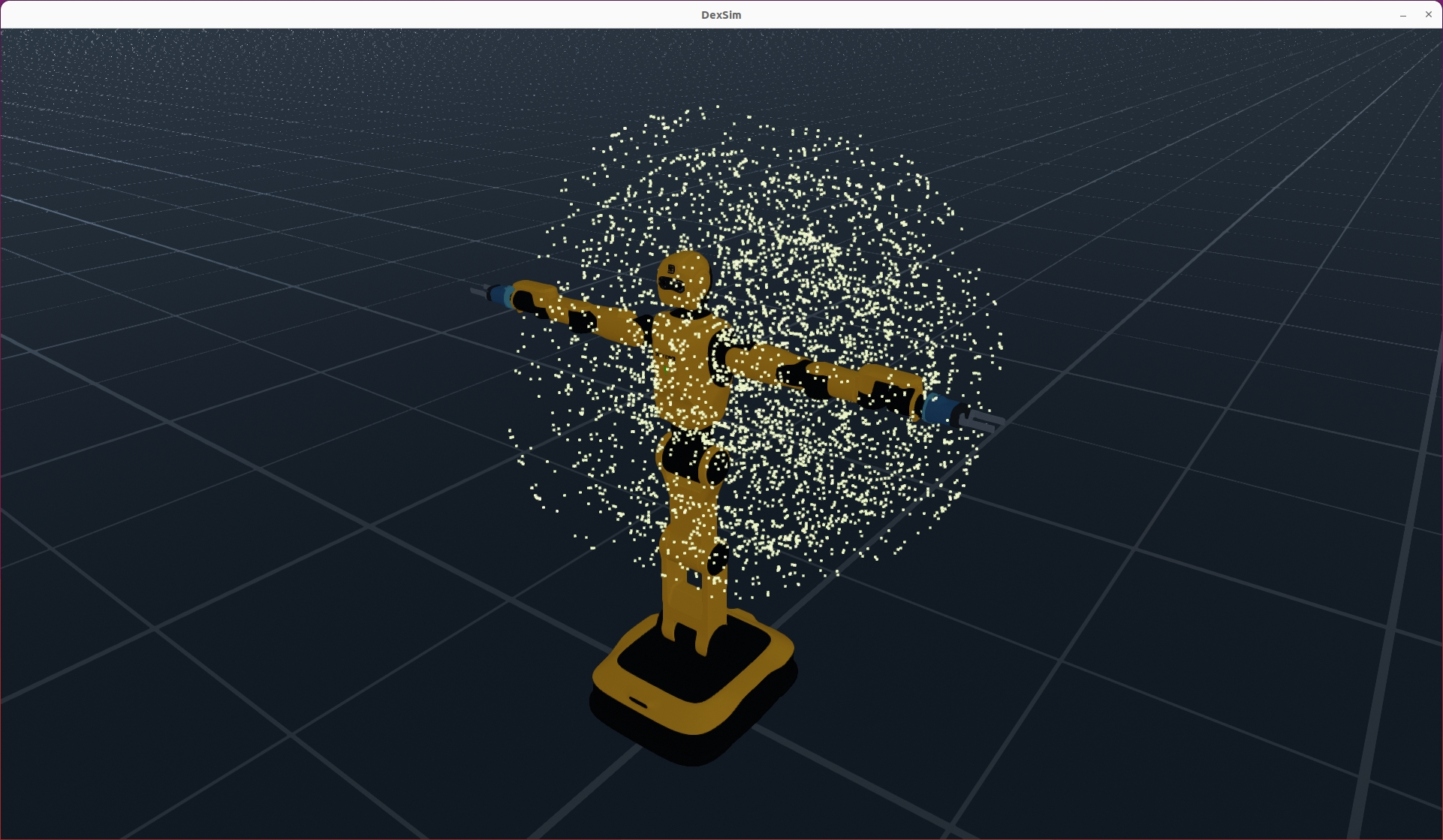
Joint Space Analysis#
Analyzes robot workspace based on joint configurations.
wa_joint = WorkspaceAnalyzer(robot=robot, sim_manager=sim)
results = wa_joint.analyze(num_samples=1000, visualize=True)
print(f"Valid points: {results['num_valid']}/{results['num_samples']}")
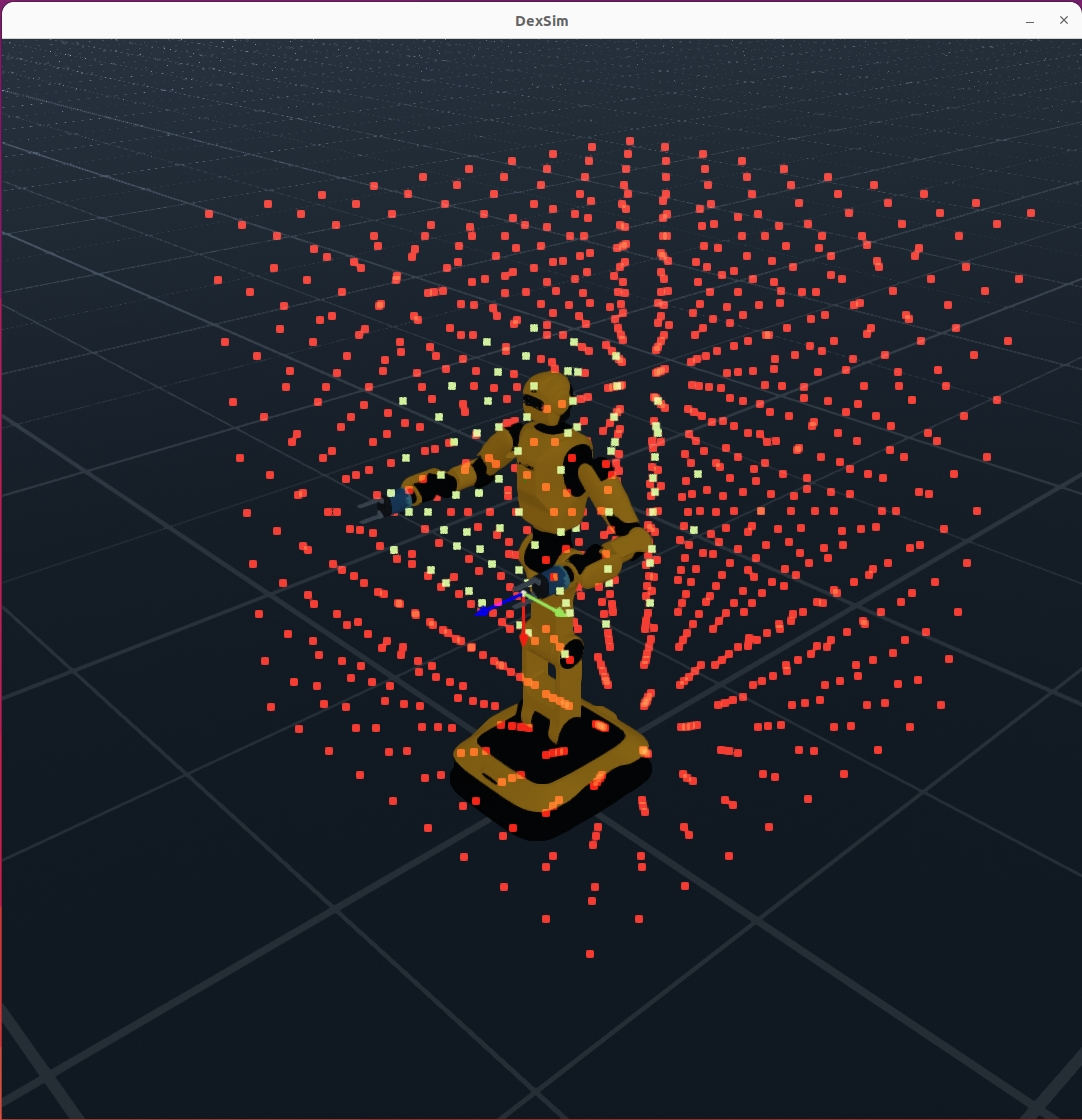
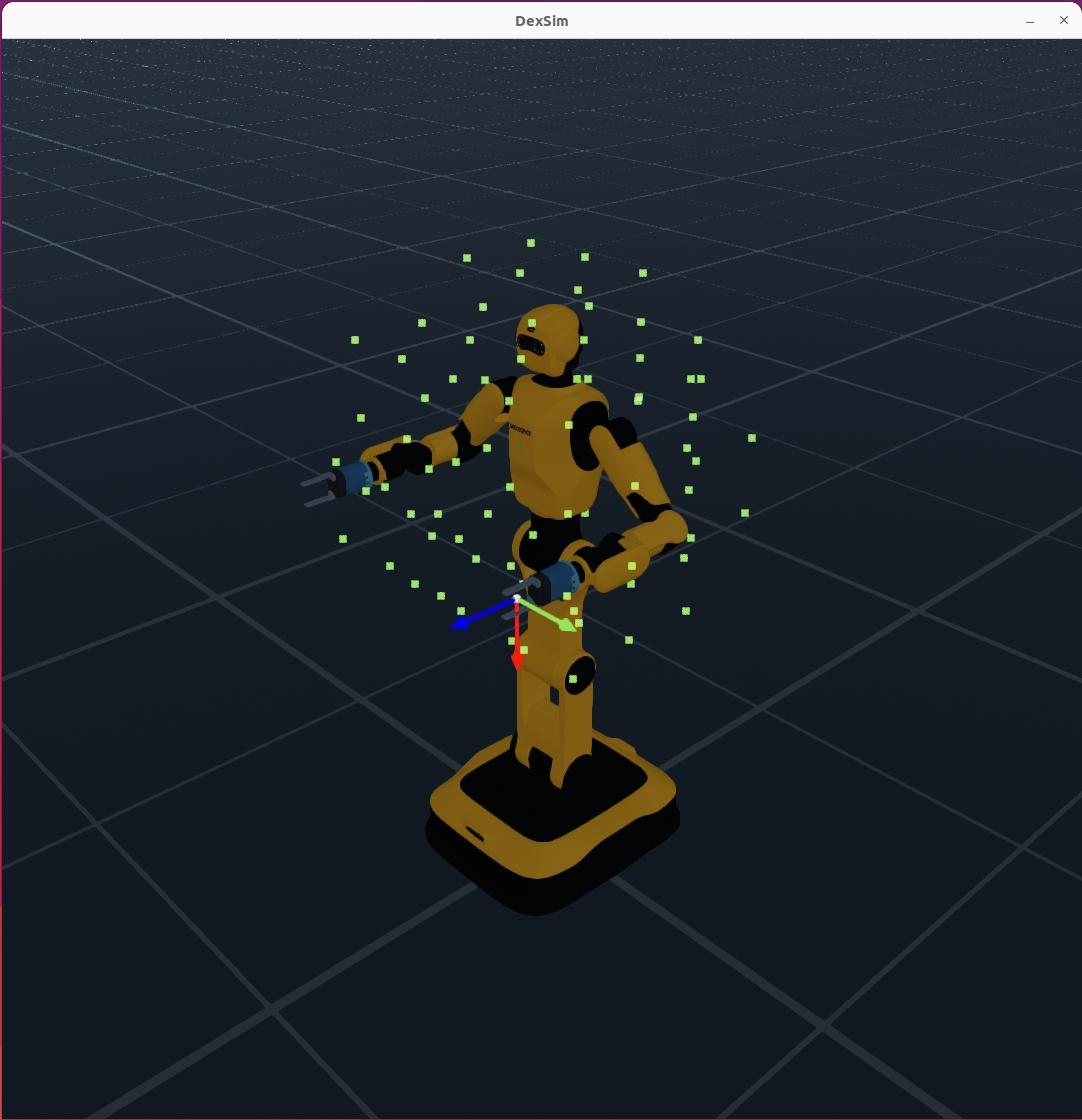
Cartesian Space Analysis#
Analyzes reachable positions in 3D Cartesian space.
cartesian_config = WorkspaceAnalyzerConfig(
mode=AnalysisMode.CARTESIAN_SPACE,
visualization=VisualizationConfig(show_unreachable_points=False, point_size=8.0),
control_part_name="left_arm",
)
wa_cartesian = WorkspaceAnalyzer(robot=robot, config=cartesian_config, sim_manager=sim)
results = wa_cartesian.analyze(num_samples=1000, visualize=True)
print(f"Reachable points: {results['num_reachable']}/{results['num_samples']}")
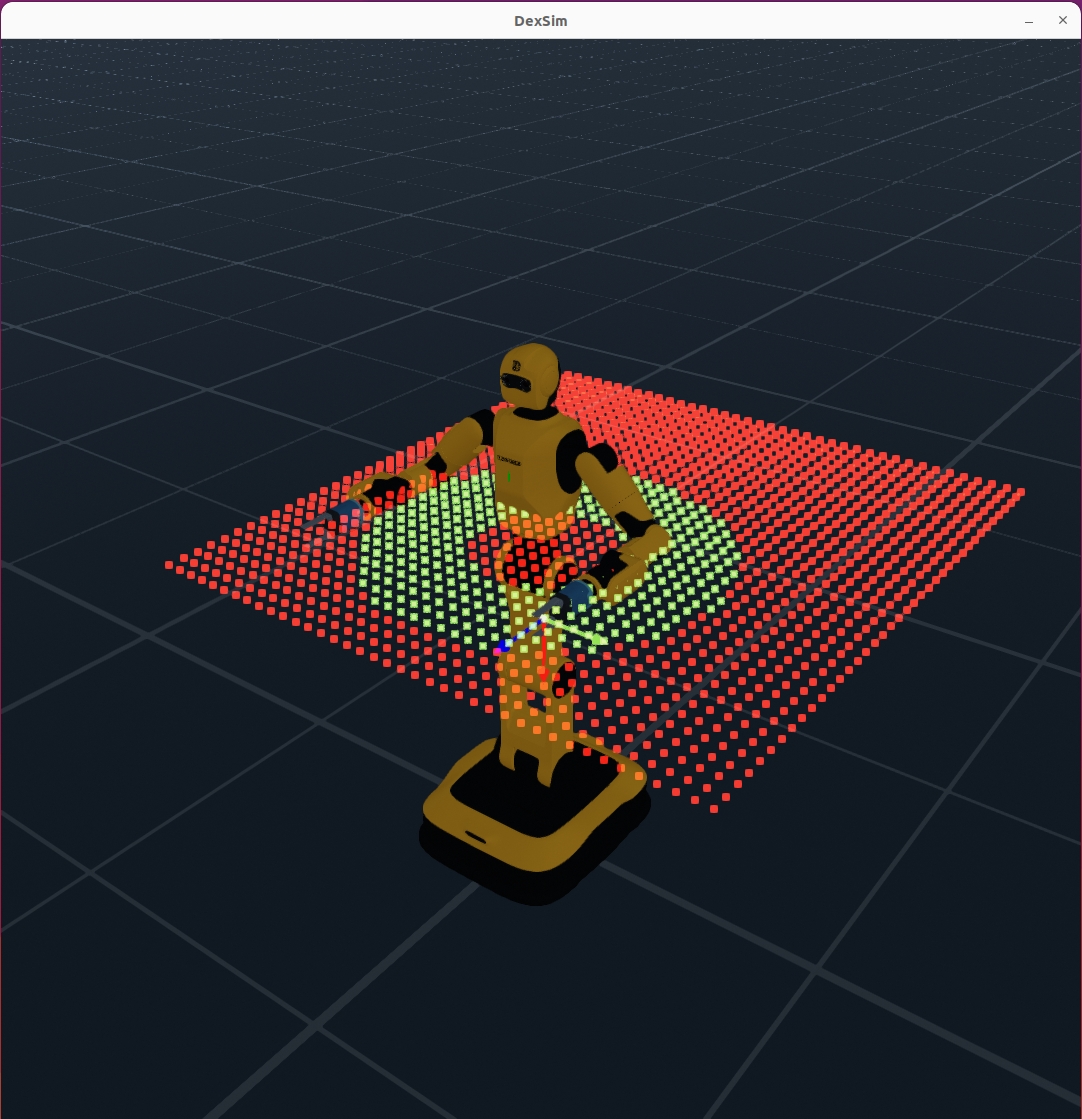
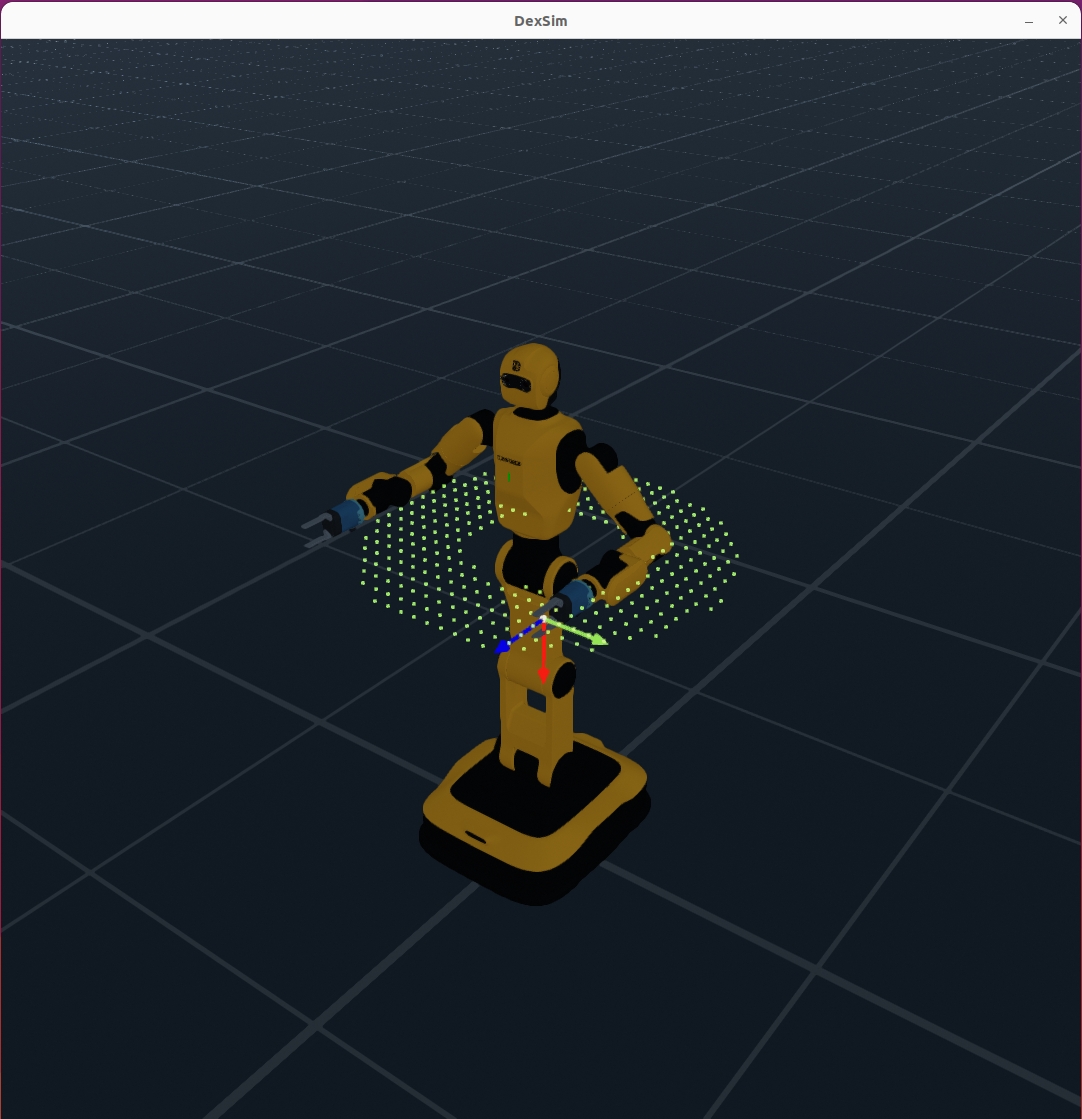
Plane Sampling Analysis#
Analyzes reachability within a 2D plane (e.g., table height).
plane_config = WorkspaceAnalyzerConfig(
mode=AnalysisMode.PLANE_SAMPLING,
plane_normal=torch.tensor([0.0, 0.0, 1.0]), # Horizontal plane
plane_point=torch.tensor([0.0, 0.0, 1.2]), # Height z=1.2m
visualization=VisualizationConfig(show_unreachable_points=True, point_size=8.0),
control_part_name="left_arm",
)
wa_plane = WorkspaceAnalyzer(robot=robot, config=plane_config, sim_manager=sim)
results = wa_plane.analyze(num_samples=1500, visualize=True)
print(f"Reachable points: {results['num_reachable']}/{results['num_samples']}")
Configuration#
Basic Configuration#
from embodichain.lab.sim.utility.workspace_analyzer.configs import VisualizationConfig
# Basic configuration with defaults
config = WorkspaceAnalyzerConfig(
mode=AnalysisMode.CARTESIAN_SPACE
)
# Custom visualization
vis_config = VisualizationConfig(
show_unreachable_points=False, # Only show reachable points
point_size=8.0 # Larger points for visibility
)
config = WorkspaceAnalyzerConfig(
mode=AnalysisMode.CARTESIAN_SPACE,
visualization=vis_config,
control_part_name="left_arm",
)
Configuration Parameters#
Main Parameters:
mode: Analysis mode (JOINT_SPACE, CARTESIAN_SPACE, PLANE_SAMPLING)plane_normal: Normal vector for plane sampling (3D vector)plane_point: Point on plane for plane sampling (3D point)
Visualization Options:
show_unreachable_points: Show failed samples (True) or only reachable (False)point_size: Size of visualization points (typically 6.0-10.0)
Usage Examples#
Complete Example#
import torch
import numpy as np
from embodichain.lab.sim import SimulationManager, SimulationManagerCfg
from embodichain.lab.sim.robots import DexforceW1Cfg
from embodichain.lab.sim.utility.workspace_analyzer import (
WorkspaceAnalyzer, WorkspaceAnalyzerConfig, AnalysisMode
)
from embodichain.lab.sim.utility.workspace_analyzer.configs import VisualizationConfig
# Setup simulation
sim = SimulationManager(SimulationManagerCfg(headless=False, sim_device="cpu"))
# Add robot
robot = sim.add_robot(DexforceW1Cfg.from_dict({
"uid": "dexforce_w1", "version": "v021", "arm_kind": "industrial"
}))
# 1. Joint Space Analysis
wa_joint = WorkspaceAnalyzer(robot=robot, sim_manager=sim)
results = wa_joint.analyze(num_samples=1000, visualize=True)
# 2. Cartesian Space Analysis
cartesian_config = WorkspaceAnalyzerConfig(
mode=AnalysisMode.CARTESIAN_SPACE,
visualization=VisualizationConfig(show_unreachable_points=False),
control_part_name="left_arm",
)
wa_cartesian = WorkspaceAnalyzer(robot=robot, config=cartesian_config, sim_manager=sim)
results = wa_cartesian.analyze(num_samples=1000, visualize=True)
# 3. Plane Sampling
plane_config = WorkspaceAnalyzerConfig(
mode=AnalysisMode.PLANE_SAMPLING,
plane_normal=torch.tensor([0.0, 0.0, 1.0]), # Horizontal plane
plane_point=torch.tensor([0.0, 0.0, 1.2]), # Height 1.2m
control_part_name="left_arm", # robot control part name
)
wa_plane = WorkspaceAnalyzer(robot=robot, config=plane_config, sim_manager=sim)
results = wa_plane.analyze(num_samples=1500, visualize=True)
Best Practices#
Sample Size Guidelines:
Joint space: 1000-3000 samples
Cartesian space: 1000-2000 samples
Plane sampling: 1000-1500 samples
Visualization Tips:
Use
show_unreachable_points=Falsefor clean workspace boundariesUse
show_unreachable_points=Truefor debugging and complete coverageSet
point_size=8.0for better visibilityUse
headless=Falsefor visualization,headless=Truefor batch processing
Performance:
Start with smaller sample sizes (1000) for testing
Use CPU device for consistent results
Disable visualization for large batch analyses
Results:
num_valid: Valid joint configurations (Joint Space)num_reachable: Reachable Cartesian points (Cartesian/Plane)num_samples: Total samples testedanalysis_time: Time taken for analysismetrics: Workspace volume and other metrics